todas as categorias
-
Circuitos integrados (ICs)
Circuitos integrados (ICs)
- Interface - Sensor, toque capacitivo(642)
- ICs especializados(12302)
- PMIC - Reguladores de tensão - Objetivo Especial(5644)
- PMIC - Reguladores de tensão - Controladores de regulador linear(793)
- MPCI - reguladores de tensão - Linear + comutação(1829)
- MPCI - reguladores de tensão - Linear(70981)
- PMIC - Reguladores de tensão - reguladores de comutação DC DC(39569)
- PMIC - Reguladores de tensão - Controladores de comutação DC DC(13507)
- MPCI - referência de tensão(9453)
- MPCI - V/F e F/V-conversores(145)
- MPCI - gerenciamento térmico(592)
- MPCI - supervisores(47946)
- MPCI - RMS para conversores DC(170)
- Monitores PMIC - controladores de fonte de poder,(2104)
- MPCI - Power Over Ethernet (PoE) controladores(1008)
- MPCI - gerenciamento de energia - especializada(7722)
- PMIC - interruptores de distribuição de energia, drivers de carga(7706)
- MPCI - PFC (correção do fator de potência)(1222)
- MPCI - ou controladores, diodos Ideal(705)
- MPCI - Motor Drivers, controladores(4712)
- MPCI - iluminação, controladores de lastro(560)
- MPCI - LED Drivers(7282)
- MPCI - Laser Drivers(573)
- MPCI - controladores de Hot-Swap(2816)
- MPCI - Gate Drivers(7083)
- MPCI - Drivers cheios, meia-ponte(1342)
- MPCI - medição de energia(654)
- MPCI - Drivers de vídeo(1435)
- MPCI - Regulamento/gestão atual(1481)
- MPCI - gerenciamento de bateria(5553)
- MPCI - carregadores de bateria(3831)
- MPCI - AC DC conversores, Switchers off-line(4905)
- Memória - controladores(358)
- Memória - configuração bailes para FPGAs(639)
- Memória - baterias(13)
- Memória(65694)
- Lógica - funções de barramento Universal(706)
- Lógica - tradutores, nível Shifters(2854)
- Lógica - lógica de especialidade(1870)
- Lógica - interruptores de sinal, multiplexadores, decodificadores(9420)
- Lógica - registradores de deslocamento(2665)
- Lógica - paridade geradores e damas(335)
- Lógica - Multivibrators(831)
- Lógica - travas(3658)
- Lógica - portões e inversores - multifuncional, configurável(1687)
- Lógica - portões e inversores(16453)
- Lógica - Flip-Flops(7780)
- Lógica - memória FIFOs(4240)
- Lógica - contadores, divisores(3456)
- Lógica - comparadores(592)
- Lógica - Buffers, motoristas, receptores, transceptores(17835)
- Linear - processamento de vídeo(2909)
- Linear - comparadores(5084)
- Linear - multiplicadores analógicos, divisores(263)
- Linear - amplificadores - amplificadores e módulos de vídeo(1905)
- Linear - amplificadores - finalidade especial(1856)
- Linear - amplificadores - instrumentação, amplificadores op, amplificadores de buffer(34236)
- Linear - amplificadores - áudio(4567)
- Interface - gravação de voz e Playback(556)
- Interface - Uarts (transmissor de receptor assíncrono universal)(1237)
- Interface - Telecom(4467)
- Interface - especializada(4833)
- Interface - terminadores de sinal(333)
- Interface - buffers de sinal, repetidores, divisores(1449)
- Interface - serializadores, Deserializers(1480)
- Interface - Sensor e Detector de Interfaces(1524)
- Interface - módulos(169)
- Módulos e interface - Modems - ICs(407)
- -Interface de i/o expansores(1136)
- Interface - filtros - ativo(1226)
- Interface - codificadores, decodificadores, conversores(714)
- Interface - Drivers, receptores, transceptores(20755)
- Interface - síntese direta de Digital (DDS)(117)
- Interface - controladores(3628)
- Interface - CODECs(1676)
- Interface - comutadores analógicos, multiplexadores, desmultiplexadores(12567)
- Interface - interruptores analógicos - propósito especial(2533)
- Incorporado - System On Chip (SoC)(4496)
- Incorporado - PLDs (dispositivo lógico programável)(971)
- Incorporado - microprocessadores(10083)
- Incorporado - Microcontroladores - Aplicativo específico(2275)
- Incorporado - microcontroladores(99285)
- Microcontrolador incorporado - Microcontrolador, Microprocessador, FPGA(1527)
- Incorporado - FPGAs (matriz de portão programável de campo) com microcontroladores(81)
- Incorporado - FPGAs (matriz de portão programável de campo)(27747)
- Incorporado - DSP (processadores de sinal digital)(4081)
- Incorporado - CPLDs (dispositivos lógicos programáveis complexos)(5187)
- Aquisição de dados - Controladores de tela de toque(1210)
- Aquisição de dados - conversores digitais para analógicos (DAC)(14419)
- Aquisição de dados - potenciómetros digitais(6250)
- Aquisição de dados - conversores analógicos para digitais (ADC)(17776)
- Aquisição de dados - Front-End analógico (AFE)(787)
- Dados aquisição ADCs/DACs - finalidade especial(3043)
- Relógio/calendário - relógios de tempo Real(2446)
- Relógio/Tempo - Timadores e osciladores programáveis(23469)
- Relógio/calendário - IC baterias(4)
- Relógio/calendário - linhas de atraso(1049)
- Relógio/tempo - Geradores de relógio, PLLs, sintetizadores de frequência(32775)
- Relógio/calendário - relógio Buffers, Drivers(4568)
- Relógio/calendário - específicos do aplicativo(8652)
- Áudio efeito especial(1564)
Fabricante relevante







-
Produtos semicondutores discretos
Produtos semicondutores discretos
- Regulamento atual - diodos, transistores(1090)
- Transistores - finalidade especial(226)
- Transistores - unijunção programável(48)
- Transistores - blogosferas(1558)
- Transistores - IGBTs - Single(4799)
- Transistores - IGBTs - módulos(63420)
- Transistores - IGBTs - matrizes(26)
- Transistores - FETs, MOSFETs - Single(48330)
- Transistores - FETs, MOSFETs - RF(4903)
- Transistores - FETs, MOSFETs - matrizes(6641)
- Transistores - bipolar (BJT) - Único, pré -tendencioso(4539)
- Transistores - Bipolar (BJT) - Single(25800)
- Transistores - Bipolar (BJT) - RF(2087)
- Transistores - Bipolar (BJT) - Matrizes, pré -tendenciosas(2115)
- Arrays de transistores - Bipolar (BJT)-(2310)
- Tiristores - TRIACs(4044)
- Módulos de tiristores - SCRs-(3967)
- Tiristores - SCRs(5436)
- Tiristores - DIACs, SIDACs(319)
- Os controladores de potência(1627)
- Diodos - Zener - Single(87483)
- Matrizes de diodos - Zener-(2619)
- Diodos - Capacitância variável (varicaps, varactors)(1200)
- Diodos - RF(2753)
- Diodos - retificadores - Single(67528)
- Matrizes de Diodos-retificadores - de(20581)
- Diodos - ponte retificadores(11700)
Fabricante relevante




-
RF / se e RFID
RF / se e RFID
- Cartas do módulo de identificação de assinantes (SIM)(77)
- Circuladores e isoladores de RF(1742)
- RFID, RF, acesso, monitoramento de ICs(1550)
- Identificadores de RFID, etiquetas(747)
- Módulos do leitor RFID(464)
- Kits de avaliação e desenvolvimento de RFID, placas(30)
- Antenas RFID(329)
- RFI e EMI - blindagem e materiais absorventes(6444)
- RFI e EMI - contatos, Fingerstock e gaxetas(7497)
- Transmissores de RF(668)
- Módulos transceptores de RF(6900)
- Transceptor de RF ICs(4169)
- Interruptores de RF(9276)
- Escudos de RF(16401)
- Receptores de RF(1998)
- Receptor de RF, transmissor e unidades acabadas de transceptor(2763)
- Divisores de potência de RF/divisores(1223)
- ICs de controlador de potência de RF(86)
- Moduladores de RF(710)
- Misturadores de RF(2800)
- Módulos e ICs RF Misc(3276)
- RF Front-End (LNA + PA)(419)
- Kits de avaliação e desenvolvimento de RF, placas(747)
- Acoplador Direcional de RF(2718)
- Diplexeres de RF(1464)
- Detectores de RF(412)
- Demoduladores de RF(249)
- Antenas RF(12319)
- Amplificadores de RF(19651)
- Balun(1496)
- Atenuadores(4852)
Fabricante relevante






-
Optoelectronics
Optoelectronics
- Optomecânico(480)
- Equipamentos de iluminação(125)
- Diodos a laser, módulos a laser - entrega a laser, fibras a laser(345)
- Sistemas de laser Hene(31)
- Cabeças de laser Hene(27)
- Exibir luzes de fundo(93)
- Iluminação de xénon(387)
- Sobreposições de tela de toque(453)
- Indicadores de painel, luzes piloto(75729)
- Óptica - fonte de luz remota do fósforo(269)
- Óptica - refletores(665)
- Óptica - tubos de luz(5384)
- Ótica - lentes(4951)
- LEDs - espaçadores, impasse(2718)
- LEDs - Substituições de lâmpadas(29718)
- LEDs - indicadores da placa de circuito, matrizes, barras de luz, gráficos de barras(9083)
- Produtos de LED Thermal(667)
- Kits de iluminação LED(64)
- Iluminação LED - branco(37580)
- Iluminação LED - cor(4728)
- Iluminação LED - espigas, motores, módulos(28735)
- LED indicação - discreta(27601)
- Diodos a laser, módulos(1553)
- Lâmpadas - lâmpadas incandescentes, Neons(311004)
- Lâmpadas - Catodo frio fluorescente (CCFL) & amp;UV(164)
- Inversores de(7728)
- Emissores de infravermelho, UV, visível(3871)
- Fibra óptica - transmissores - circuitos de acionamento integrados(4085)
- Fibra óptica - transmissores - discreta(350)
- Fibra óptica - módulos transceptores(18758)
- Fibra óptica - interruptores, multiplexadores, desmultiplexadores(1387)
- Fibra óptica - receptores(695)
- Fibra óptica - atenuadores(654)
- Eletroluminescente(102)
- Monitor, Monitor - controlador de Interface(98)
- Exibir módulos - vácuo fluorescente (VFD)(249)
- Exibir módulos - LED matriciais e Cluster(865)
- Exibir módulos - personagem de LED e numérico(5421)
- Exibir módulos - LCD, OLED, gráfico(4654)
- Módulos de exibição - LCD, personagem OLED e numérico(2202)
- Exibir molduras, lentes(88)
- Endereçáveis, especialidade(458)
Fabricante relevante







-
Sensores, Transdutores
Sensores, Transdutores
- Receptores ultrassônicos, transmissores - industrial(115)
- Sensores de temperatura - termostatos - mecânicos - industriais(3103)
- Sensores de temperatura - Saída analógica e digital - industrial(209)
- Sensores de proximidade - industrial(13611)
- Sensores de pressão, transdutores - industriais(26503)
- Sensores ópticos - fotônica - contadores, detectores, SPCM (módulo de contagem de fótons únicos)(751)
- Sensores ópticos - módulos da câmera(875)
- Sensores magnéticos - posição, proximidade, velocidade (módulos) - Industrial(554)
- Sensores de força - industrial(346)
- Sensores de fluxo - industrial(151)
- Float, sensores de nível - industrial(310)
- Codificadores - Industrial(4980)
- Sensores de cores - industrial(50)
- Sensores de Toque(100)
- Receptores de ultra-som, transmissores(2421)
- Sensores de temperatura - termostatos - estado sólido(1096)
- Temperatura sensores - termostatos - mecânica(3397)
- Sensores de temperatura - termopares, sondas de temperatura(1921)
- Sensores de temperatura - RTD (detector de temperatura de resistência)(1525)
- Sensores de temperatura - Termistores PTC(2273)
- Sensores de temperatura - Termistores NTC(13259)
- Sensores de temperatura - saída analógica e digital(3928)
- Extensómetros(1399)
- Sensores especializados(1861)
- Células solares(503)
- Sensores de choque(84)
- Sensor Interface - blocos de junção(2519)
- Cabo do sensor - módulos (assemblies)(22011)
- Sensores de proximidade/ocupação - unidades acabadas(725)
- Sensores de proximidade(2860)
- Sensores de pressão, Transdutores(11317)
- Sensores de posição - ângulo, posição linear medindo(6022)
- Saída da lógica - reflexivo - sensores ópticos(194)
- Sensores ópticos - reflexivo - saída analógica(432)
- Sensores ópticos - Phototransistors(1027)
- Sensores ópticos - fotointerrupters - Tipo de slot - Saída do transistor(1427)
- Sensores ópticos - fotointerrupters - Tipo de slot - saída lógica(1215)
- Sensores ópticos - fotoelétricos, Industrial(16763)
- Sensores ópticos - fotodiodos(1543)
- Sensores ópticos - detectores de fotos - receptor remoto(2605)
- Sensores ópticos - detectores de fotos - saída lógica(146)
- Sensores ópticos - detectores de fotos - células CDS(74)
- Sensores ópticos - medição de distâncias(377)
- Sensores ópticos - Luz ambiente, Sensores IR, UV(1305)
- Multifunções(558)
- Sensores de movimento - vibração(337)
- Sensores de movimento - Tilt Switches(67)
- Sensores de movimento - ópticos(719)
- Sensores de movimento - Inclinometers(175)
- Sensores de movimento - IMUS (unidades de medição inercial)(416)
- Sensores de movimento - giroscópios(214)
- Sensores de movimento - acelerômetros(1911)
- Ímãs - Sensor combinado(119)
- Ímãs - Multi-usos(1965)
- Sensores magnéticos - Switches (estado sólido)(3700)
- Sensores magnéticos - posição, proximidade, velocidade (módulos)(5199)
- Sensores magnéticos - Linear, bússola (ICs)(1247)
- Sensores magnéticos - bússola, campo magnético (módulos)(35)
- Transdutores LVDT (LVDT)(204)
- Módulos do transceptor IrDA(196)
- Sensores de imagem, câmera(2235)
- Umidade, sensores de umidade(1425)
- Sensores de gás(1217)
- Sensores de força(188)
- Sensores de fluxo(550)
- Flutuador, sensores de nível(1343)
- Codificadores(6357)
- Sensores de poeira(43)
- Transdutores de corrente(3455)
- Sensores de cor(85)
- Amplificadores(1905)
Fabricante relevante







-
Conectores, interconexões
Conectores, interconexões
- Conectores USB, DVI, HDMI(446)
- Conectores de iluminação de estado sólido(555)
- Soquetes para ICS, transistores(953)
- Conectores traváveis(1221)
- Conectores fotovoltaicos (painel solar)(136)
- Conectores de fibra óptica(370)
- Conectores FFC, FPC (FLAT FLEXIBE)(761)
- Conectores em forma de D, em forma de D(2887)
- Conectores coaxiais (RF)(2389)
- Conectores circulares(14162)
- Conectores de energia do tipo lâmina(273)
- Plugues e receptáculos(2597)
- USB, DVI, HDMI conectores - adaptadores(572)
- Conectores USB, DVI, HDMI(4298)
- Terminais - fio aos conectores da placa(217)
- Terminais - conectores Splice(4322)
- Terminais - conectores de pinos de arame(328)
- Terminais - conectores de torreta(1273)
- Terminais - conectores especializados(2042)
- Terminais - conectores Spade(3902)
- Terminais - conectores de solda Lug(345)
- Terminais - conectores de parafuso(745)
- Terminais - conectores anel(12596)
- Terminais - conectores retangulares(4747)
- Terminais - Conectas rápidas, conectores de desconexão rápida(8514)
- Terminais - PC Pin, único Post conectores(3776)
- Terminais - Recipsos de pinos para PC, conectores de soquete(5883)
- Terminais - conectores de fio magnético(1653)
- Terminais - conectores de faca(112)
- Terminais - caixas de proteção, botas(2850)
- Terminais - conectores da folha(108)
- Terminais - barril, conectores de bala(1107)
- Terminais - adaptadores(137)
- Tiras de terminais e placas de torreta(1159)
- Sistemas de cruzamento terminal(2533)
- Blocos terminais - fio para placa(43615)
- Blocos terminais - especializados(3722)
- Blocos terminais - distribuição de energia(847)
- Blocos terminais - montagem do painel(1359)
- Blocos terminais - módulos de Interface(1819)
- Blocos de terminais - cabeçalhos, plugues e soquetes(119920)
- Blocos terminais - trilho Din, canal(9373)
- Blocos terminais - contatos(65)
- Blocos terminais - blocos de barreira(47517)
- Blocos terminais - adaptadores(1059)
- Conectores de iluminação de estado sólido - contatos(271)
- Conectores de iluminação de estado sólido(1344)
- Soquetes para CI, transistores - adaptadores(275)
- Soquetes para ICS, transistores(22148)
- Derivações, Jumpers(907)
- Conectores retangulares - mola(7721)
- Conectores retangulares - caixas(43023)
- Conectores retangulares - cabeçalhos, pino especializado(6129)
- Conectores retangulares - cabeçalhos, recipientes, soquetes fêmeas(229601)
- Conectores retangulares - cabeçalhos, pinos masculinos(543338)
- Conectores retangulares - suspenso livre, montagem de painel(30142)
- Conectores retangulares - contatos(10681)
- Conectores retangulares - embarque, fio direto na placa(2432)
- Conectores retangulares - adaptadores(475)
- Retangular - Board para conectores de placa - cabeçalhos, receptáculos, soquetes fêmeas(9)
- Retangular - placa para conectores de placa - cabeçalhos, pinos masculinos(2)
- Conectores retangulares - espaçadores da placa, empilhadores (placa a prancha)(238901)
- Conectores retangulares - matrizes, tipo de borda, mezzanina (placa a prancha)(37853)
- Conectores de entrada de energia - enseadas, pontos de venda, módulos(10310)
- Conectores traváveis(6049)
- Conectores fotovoltaicos (painel solar) - contatos(77)
- Conectores fotovoltaicos (painel solar)(504)
- Conectores modulares - blocos de fiação(99)
- Conectores modulares - plugues(1674)
- Conectores modulares - caixas de tomada(181)
- Conectores modulares - Jacks com o magnetismo(10152)
- Conectores modulares - Jacks(23416)
- Conectores modulares - adaptadores(855)
- Conectores de memória - cartões PC - adaptadores(21)
- Conectores de memória - cartão PC Sockets(3299)
- Conectores de memória - soquetes do módulo embutido(3390)
- Conectores de instruções(764)
- Keystone - inserções(2758)
- Keystone - Faceplates, quadros(1926)
- Módulos de conectores - inserções, pesados(4190)
- Heavy Duty conectores - carcaças, capas, Bases(17226)
- Conectores de pesados - quadros(523)
- Conectores de pesados - contatos(1832)
- Conectores de pesados - módulos (assemblies)(671)
- Fibra óptica conectores - caixas(919)
- Conectores de fibra ótica - adaptadores(4455)
- Conectores de fibra óptica(3001)
- FFC, FPC Conectores (plano flexíveis) - caixas(652)
- Conectores FFC, FPC (FLAT FLEXIBE) - Contatos(202)
- Conectores FFC, FPC (FLAT FLEXIBE)(18691)
- Conectores D-Sub, em forma de D - terminadores(47)
- Conectores D-Sub, em forma de D - caixas(12238)
- Conectores D-Sub, em forma de D - contatos(2714)
- D-sub, conectores em forma de D-Backshells, capuzes(5995)
- Conectores D-Sub, em forma de D - adaptadores(1304)
- Conectores D-Sub(141346)
- Conectores em forma de D - Centronics(8770)
- Contatos, mola e pressão(630)
- Contatos - Multi-usos(6196)
- Contatos - Leadframe(122)
- Conectores coaxiais (RF) - terminadores(1231)
- Conectores coaxiais (RF) - contactos(480)
- Conectores coaxiais (RF) - adaptadores(6386)
- Conectores coaxiais (RF)(25734)
- Conectores circulares - caixas(441226)
- Conectores circulares - contatos(4737)
- Conectores circulares - backshells e grampos de cabos(53692)
- Conectores circulares - adaptadores(8839)
- Conectores circulares(1196254)
- Conectores de borda - caixas de cartão(469)
- Conectores de borda de cartão - conectores de bordo(672683)
- Conectores de borda de placa - contatos(325)
- Conectores de borda de placa - adaptadores(73)
- Conectores de alimentação tipo lâmina - caixas(837)
- Conectores de alimentação tipo lâmina - contatos(393)
- Conectores de energia do tipo lâmina(4163)
- Entre adaptadores de série(649)
- Barril - conectores de alimentação(935)
- Barril - conectores de áudio(2432)
- Barril - adaptadores de áudio(92)
- Banana e ponta conectores - conectores, plugues(1644)
- Banana e conectores de ponta - bornes(239)
- Banana e ponta conectores - adaptadores(75)
- Conectores de backplane - especializadas(45586)
- Conectores de backplane - caixas(6863)
- Padrão de conectores - métrica difícil, backplane(6297)
- Conectores de backplane - DIN 41612(9408)
- Conectores de backplane - contatos(3583)
- Conectores de backplane - ARINC inserções(2357)
- Conectores de backplane - ARINC(3789)
Fabricante relevante







-
Resistores
-
Capacitores
Capacitores
- Capacitores eletrolíticos de alumínio(16817)
- Aparadores, capacitores variáveis(3151)
- Condensadores de película fina(3473)
- Capacitores de tântalo(136103)
- Tântalo - condensadores de polímero(9778)
- Capacitores de silício(320)
- Capacitores de óxido de nióbio(330)
- Mica e capacitores PTFE(9101)
- Capacitores de filme(150406)
- Capacitores de dupla camada elétrica (EDLC), supercapacitores(2782)
- Capacitores cerâmicos(833829)
- Redes de capacitor, matrizes(2383)
- Capacitores eletrolíticos de alumínio(125325)
- Alumínio - condensadores de polímero(7544)
Fabricante relevante






-
Transformadores
Transformadores
- Conversor de comutação, transformadores SMPS(1483)
- Transformadores de especialidade(339)
- Transformadores de pulso(8012)
- Transformadores de potência(8095)
- Transformadores de isolamento e autotransformadores, intensificar, descer para baixo(583)
- Transformadores de sentido atual(1325)
- Transformadores de áudio(766)
Fabricante relevante







-
Isoladores de
-
Cristais, osciladores, ressonadores
-
Interruptores
Interruptores
- Interruptores de bloqueio(2893)
- Interruptores de parada de emergência (e-spop)(1160)
- Chaves de Puxar Cabo(571)
- Interruptores(33608)
- Interruptores de botão giratório(742)
- Interruptores tácteis(14263)
- Acção rápida, interruptores de limite(28077)
- Interruptores de slide(5166)
- Chaves seletoras(9720)
- Comutadores rotativos(13850)
- Interruptores de balancim(53790)
- Interruptores de botão de pressão - efeito Hall(127)
- Interruptores de botão(190826)
- Opções de Display programável(39)
- Opções de navegação, Joystick(1882)
- Magnético, Reed Switches(1399)
- Comutadores de teclado(637)
- Keylock Switches(3684)
- DIP Switches(7747)
- Switch configurável componentes - lente(1435)
- Componentes de comutação configuráveis - fonte de iluminação(1236)
- Componentes de comutação configuráveis - bloco de contato(1401)
- Switch configurável componentes - corpo(16077)
- Desligue o interruptor de componentes(2567)
Fabricante relevante






-
Relés
Relés
- Relés de segurança(1310)
- Relés de Reed(1735)
- Relés de alta frequência (RF)(1190)
- Contatores (estado sólido)(686)
- Contatores (eletromecânicos)(11952)
- Relés Automotivos(1881)
- Relés de estado sólido(10652)
- Relés de sinal, até 2 ampères(9149)
- Soquetes de relé(2075)
- Relés de potência, sobre 2 ampères(31604)
- Módulos de relés de E / S(712)
- Módulos de i/o - entrada(2)
- Racks de módulo de i/o relé(247)
Fabricante relevante






















Selecione o idioma
Linguagem atual
Português
- English
- Deutsch
- Italia
- Français
- 日本語
- 한국의
- русский
- Svenska
- Nederland
- español
- Português
- polski
- Suomi
- Gaeilge
- Slovenská
- Slovenija
- Čeština
- Melayu
- Magyarország
- Hrvatska
- Dansk
- românesc
- Indonesia
- Ελλάδα
- Български език
- Afrikaans
- IsiXhosa
- isiZulu
- lietuvių
- Maori
- Kongeriket
- Монголулс
- O'zbek
- Tiếng Việt
- हिंदी
- اردو
- Kurdî
- Català
- Bosna
- Euskera
- العربية
- فارسی
- Corsa
- Chicheŵa
- עִבְרִית
- Latviešu
- Hausa
- Беларусь
- አማርኛ
- Republika e Shqipërisë
- Eesti Vabariik
- íslenska
- မြန်မာ
- Македонски
- Lëtzebuergesch
- საქართველო
- Cambodia
- Pilipino
- Azərbaycan
- ພາສາລາວ
- বাংলা ভাষার
- پښتو
- malaɡasʲ
- Кыргыз тили
- Ayiti
- Қазақша
- Samoa
- සිංහල
- ภาษาไทย
- Україна
- Kiswahili
- Cрпски
- Galego
- नेपाली
- Sesotho
- Тоҷикӣ
- Türk dili
- ગુજરાતી
- ಕನ್ನಡkannaḍa
- मराठी
Princípio de Funcionamento do IC Driver de Motor L298, Circuitos e Folhas de Dados
Tempo: 25/06/2026
Navegar: 263
O L298 é um IC driver de motor de ponte completa dupla projetado para controlar motores DC, motores de passo bipolares e outras cargas indutivas. O L298 está disponível em várias versões de pacote, sendo a L298N a mais amplamente utilizada. A designação "N" refere-se ao pacote Multiwatt-15, que é projetado para maior capacidade de manuseio de energia e fácil montagem de dissipadores de calor. Este artigo explica como o L298 funciona, suas funções de pino, especificações elétricas, tipos de motores suportados, circuitos típicos, comparação com drivers de motor modernos e aplicações comuns.
Motores CC com Escovas
Motores de Passo Bipolares
Atuadores Lineares e Pequenos Atuadores Robóticos
Circuito do Driver de Motor DC Duplo L298N
Catálogo
Como o Driver de Motor L298 Funciona
O L298 controla motores DC e motores de passo usando dois circuitos H-bridge independentes, rotulados como Canal A e Canal B no diagrama de blocos. Cada H-bridge recebe sinais lógicos dos pinos de entrada e comuta a rede de transistores internos para controlar a direção da corrente que flui através do motor.
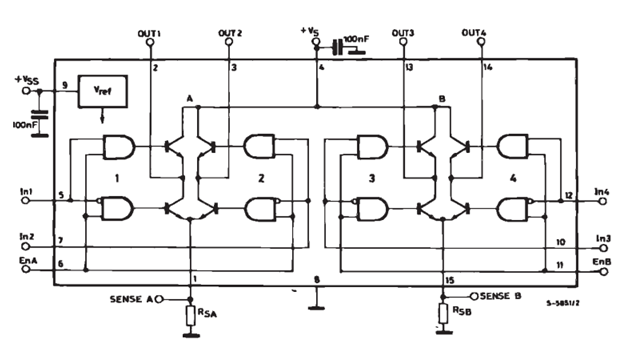
Como mostrado no diagrama de blocos, IN1 e IN2 controlam o Canal A, enquanto IN3 e IN4 controlam o Canal B. Quando uma entrada está ALTA e a outra está BAIXA, o H-bridge cria um caminho de corrente através do motor, fazendo com que ele gire. Reverter os estados de entrada inverte o fluxo de corrente e muda a direção de rotação do motor.
Os pinos ENA e ENB habilitam ou desabilitam cada H-bridge. Esses pinos são comumente acionados por um sinal PWM de um microcontrolador. Ajustando o ciclo de trabalho PWM, a tensão média aplicada ao motor muda, permitindo o controle de velocidade.
A alimentação do motor é fornecida através do pino +Vs, enquanto a lógica interna opera a partir de +Vss. Os pinos SENSE A e SENSE B podem ser conectados a resistores externos para monitorar a corrente do motor para proteção ou controle.
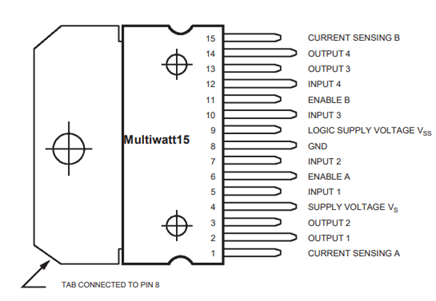
Pinagem do L298 e Funções dos Pinos
| Pino No. |
Nome do Pino |
Função |
| 1 |
Sense A |
Conexão de detecção de corrente para o Canal A. Geralmente conectado a um resistor de baixo valor para monitoramento de corrente. |
| 2 |
OUT1 |
Terminal de saída 1 da H-Bridge A conectado ao motor. |
| 3 |
OUT2 |
Terminal de saída 2 da H-Bridge A conectado ao motor. |
| 4 |
Vs |
Tensão de fornecimento de energia do motor. Fornece energia à etapa de saída. |
| 5 |
IN1 |
Entrada de controle lógica 1 para H-Bridge A. Funciona com IN2 para controlar a direção do motor. |
| 6 |
ENA |
Entrada de habilitação para H-Bridge A. Usada para habilitar/desabilitar o canal e para controle de velocidade PWM. |
| 7 |
IN2 |
Entrada de controle lógica 2 para H-Bridge A. Funciona com IN1 para controlar a direção do motor. |
| 8 |
GND |
Conexão de terra para circuitos lógicos e de potência. A aba de metal também está conectada a este pino. |
| 9 |
Vss |
Entrada de tensão do fornecimento lógico, tipicamente 5 V. Alimenta a circuitaria de controle interna. |
| 10 |
IN3 |
Controlo lógico entrada 1 para H-Bridge B. Trabalha com IN4 para controlar a direção do motor. |
| 11 |
ENB |
Entrada de ativação para H-Bridge B. Usada para ativar/desativar o canal e para controlo de velocidade PWM. |
| 12 |
IN4 |
Controlo lógico entrada 2 para H-Bridge B. Trabalha com IN3 para controlar a direção do motor. |
| 13 |
OUT3 |
Terminal de saída 1 do H-Bridge B conectado ao motor. |
| 14 |
OUT4 |
Terminal de saída 2 do H-Bridge B conectado ao motor. |
| 15 |
Sensoriamento B |
Conexão de sensoriamento de corrente para o Canal B. Normalmente ligada a um resistor de baixo valor para monitoramento de corrente. |
Especificações Elétricas Principais do L298
| Especificação |
Valor |
Unidade |
| Tensão de Alimentação do Motor (Vs) |
Até 46 (50 V máximo absoluto) |
V |
| Tensão de Alimentação Lógica (Vss) |
4.5 a 7 (5 V típico) |
V |
| Tensão de Entrada Lógica (ALTA) |
≥ 2.3 |
V |
| Tensão de Entrada Lógica (BAIXA) |
≤ 1.5 |
V |
| Corrente de Saída Contínua (Por Canal) |
2 |
A |
| Corrente de Saída de Pico Repetitiva |
2.5 |
A |
| Corrente de Saída de Pico Não Repetitiva |
3 |
A |
| Dissipação Total de Potência |
25 |
W |
| Corrente de Alimentação em Quiescente (Vs) |
13–70 |
mA |
| Corrente de Alimentação em Quiescente (Vss) |
6–36 |
mA |
| Faixa de Tensão de Sensoriamento de Corrente |
-1 a 2.3 |
V |
| Queda de Tensão de Saída (Carga de 1 A) |
1.8–3.2 |
V |
| Queda de Tensão de Saída (Carga de 2 A) |
4.9 máximo |
V |
| Tensão de Saturação da Fonte (1 A) |
1.35 típico |
V |
| Tensão de Saturação da Fonte (2 A) |
2.0 típico |
V |
| Tensão de Saturação do Dreno (1 A) |
1.2 típico |
V |
| Tensão de Saturação do Dreno (2 A) |
1.7 típico |
V |
| Frequência Máxima de Comutação |
25–40 |
kHz |
| Atraso de Ligação da Fonte |
2 |
µs |
| Atraso de Desligamento da Fonte |
1.5 |
µs |
| Tempo de Aumento da Fonte |
0.7 |
µs |
| Tempo de Queda da Fonte |
0.2 |
µs |
| Atraso de Ligação do Dreno |
1.6 |
µs |
| Atraso de Desligamento do Dreno |
0.7 |
µs |
| Tempo de Aumento do Dreno |
0.2 |
µs |
| Tempo de Queda do Dreno |
0.25 |
µs |
| Faixa de Temperatura de Operação |
-25 a +130 |
°C |
| Faixa de Temperatura de Armazenamento |
-40 a +150 |
°C |
Que Motores Podem ser Acionados pelo L298?
O L298 foi projetado para acionar uma variedade de sistemas baseados em motores de escovas utilizando sua arquitetura de ponte H dual. Cada ponte H pode controlar independentemente a direção e a velocidade de uma carga conectada, permitindo que o CI opere dois motores CC simultaneamente ou um único motor de passo bipolar.
Motores CC com Escovas
Motores CC com escovas são os motores mais comuns acionados pelo L298. O CI pode controlar tanto a direção de rotação quanto a velocidade de um motor CC alternando o fluxo de corrente através de suas saídas de ponte H. Um único L298 pode acionar um motor CC maior usando um canal ou dois motores CC separados utilizando ambos os canais da ponte H.
Motores de Passo Bipolares
O L298 pode acionar motores de passo bipolares de 2 fases usando seus dois canais de ponte H para controlar as duas bobinas do motor. Energizando as bobinas em uma sequência específica, o motor gira em passos angulares precisos em vez de rotação contínua. Isso permite um controle preciso de posição, velocidade e direção de movimento.
Atuadores Lineares e Pequenos Atuadores Robóticos
Muitos atuadores lineares DC utilizam um motor de escovas DC interno, tornando-os compatíveis com o L298. Ao controlar a direção do motor através da ponte H, o atuador pode estender ou retrair conforme necessário. Isso torna o L298 útil para aplicações como portas automáticas, plataformas ajustáveis, válvulas e sistemas de controlo industrial simples.
Circuitos de Aplicação Típicos do L298
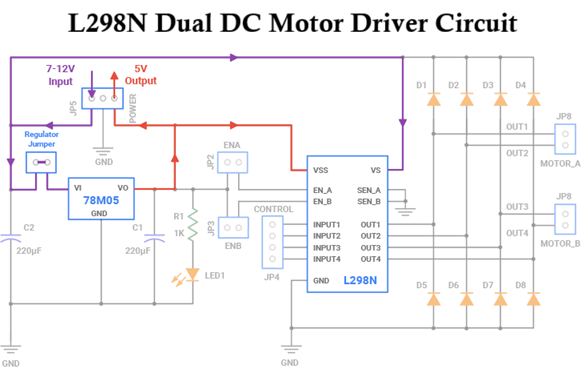
Circuito do Driver de Motor DC Duplo L298N
O circuito utiliza o L298N CI para controlar dois motores CC. Uma alimentação de 7–12V alimenta os motores através do pino VS, enquanto o regulador 78M05 converte esta entrada em 5V para a seção lógica do L298N através do pino VSS.
O L298N contém dois circuitos H-bridge internos. Estes permitem que a corrente flua através de cada motor em qualquer direção, assim os motores podem rodar para frente ou para trás. OUT1 e OUT2 controlam o Motor A, enquanto OUT3 e OUT4 controlam o Motor B.
Os pinos de entrada INPUT1 a INPUT4 recebem sinais de um microcontrolador. Estes sinais decidem a direção do motor. Os pinos ENA e ENB ativam cada canal do motor e também podem receber sinais PWM para controlar a velocidade do motor.
Os capacitores ajudam a estabilizar a fonte de alimentação, enquanto os diodos protegem o CI contra picos de tensão back-EMF produzidos pelos motores. No geral, este circuito permite que um controlador de baixa potência conduza e controle com segurança dois motores CC.
Circuito de Driver de Motor de Passo Bipolar Usando L297 e L298
Este circuito combina o controlador de motor de passo L297 e o driver de motor H-bridge duplo L298N para controlar um motor de passo bipolar de duas fases. O L297 gera a sequência de fases correta necessária para a operação do motor de passo, enquanto o L298N fornece a corrente mais alta necessária para conduzir os enrolamentos do motor.
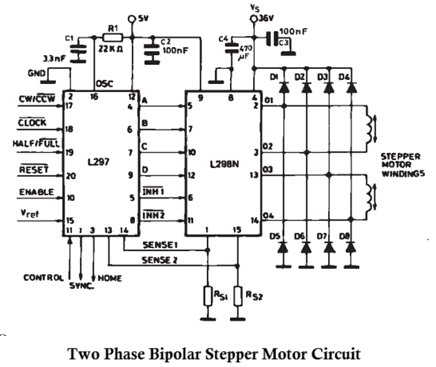
O L297 recebe sinais de controle como CLOCK, CW/CCW, HALF/FULL, RESET e ENABLE. Com base nestas entradas, ele gera quatro sinais de saída (A, B, C e D) que determinam a sequência de passos. A entrada CLOCK controla a taxa de passos, enquanto a entrada CW/CCW seleciona a direção de rotação. A entrada HALF/FULL permite que o motor opere em modo de meio passo ou passo completo.
Os sinais de saída do L297 estão conectados aos pinos de entrada do L298N. O L298N atua como um driver H-bridge duplo, alternando a corrente através dos dois enrolamentos do motor. Ao energizar os enrolamentos na sequência correta, o motor gira um passo de cada vez com controle de posição preciso.
Os resistores RS1 e RS2 conectados aos pinos SENSE são resistores de medição de corrente. Eles permitem que o L297 monitore a corrente do motor e implemente a regulação de corrente através de sua função de controle interno do chopper. Isso ajuda a prevenir corrente excessiva e melhora a eficiência do motor.
Os diodos D1–D8 são diodos de flyback que protegem o L298N contra picos de tensão gerados pelos enrolamentos indutivos do motor. Os capacitores perto da fonte de alimentação ajudam a filtrar ruído e estabilizar a tensão de operação.
L298 vs ICs de Driver de Motor Modernos
| Dados |
L298 |
L293D |
TB6612FNG |
DRV8833 |
BTS7960 |
| Tipo de Driver |
Transistor bipolar |
Transistor bipolar |
MOSFET |
MOSFET |
MOSFET |
| Canais do Motor |
2 motores CC |
2 motores CC |
2 motores CC |
2 motores CC |
1 motor CC |
| Corrente Contínua |
2A/canal |
600mA/canal |
1.2A/canal |
1.5A/canal |
43A |
| Corrente de Pico |
3A |
1.2A |
3.2A |
2A |
43A+ |
| Tensão do Motor |
Até 46V |
Até 36V |
Até 13.5V |
2.7V–10.8V |
Até 27V |
| Tensão Lógica |
5V |
5V |
2.7V–5.5V |
2.7V–7V |
3.3V–5V |
| Diodos de Proteção |
Externo requerido |
Integrado |
Integrado |
Integrado |
Integrado |
| Uso Principal |
Motores CC médios |
Motores CC pequenos |
Pequenos robôs |
Robôs de baixa tensão |
Motores CC de alta corrente |
Aplicações Comuns do L298
Controle de Motor CC com Escovas
O L298 é comumente usado para acionar um ou dois motores CC com escovas. Ele pode mudar a direção do motor invertendo o fluxo de corrente e controlar a velocidade do motor usando sinais PWM de um microcontrolador.
Controle de Motor de Passo Bipolar
O L298 pode acionar um motor de passo bipolar de duas fases fornecendo corrente para seus enrolamentos na sequência correta. Para um controle de passos mais fácil, ele é frequentemente usado com um controlador L297.
Robótica Educacional
O L298 é amplamente utilizado em kits de robô e projetos estudantis porque é simples de conectar com Arduino e outros microcontroladores. Ele ajuda os alunos a entender o controle da direção do motor, controle de velocidade e operação de H-bridge.
Pequenos Sistemas de Automação
O L298 pode controlar motores em sistemas automatizados simples, como pequenos transportadores, mecanismos deslizantes e plataformas motorizadas. É útil quando um projeto necessita de movimento para frente e para trás.
Mecanismos de Posicionamento
O L298 pode ser utilizado em sistemas de pan-and-tilt para câmeras, pequenos eixos CNC e outros dispositivos de posicionamento. Nestas aplicações, ele aciona motores DC ou motores de passo para mover uma carga para uma posição desejada.
Circuitos Prototípicos de Driver de Motor
Engenheiros e hobbyistas usam o L298 em circuitos prototípicos porque é fácil de testar, amplamente disponível e suporta suprimentos de lógica e motor separados. Isso o torna útil para experimentos de design de controle de motor iniciais.
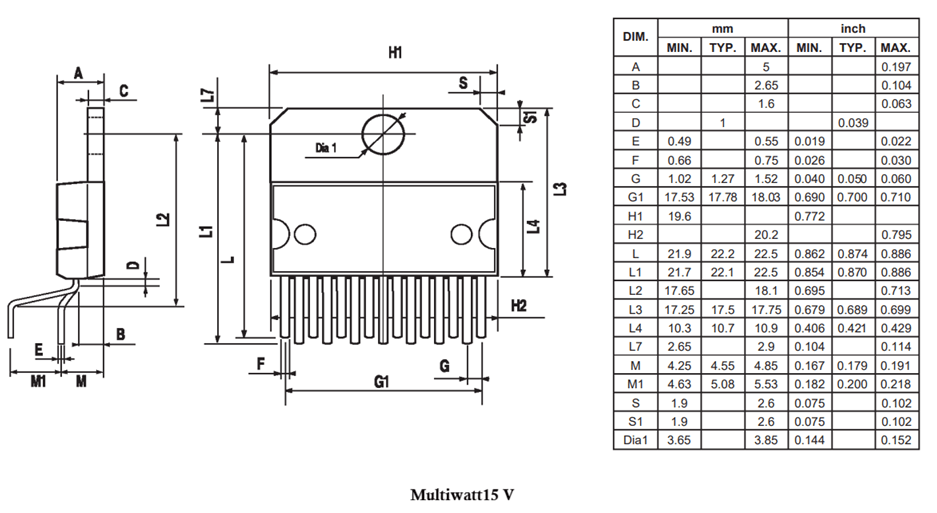
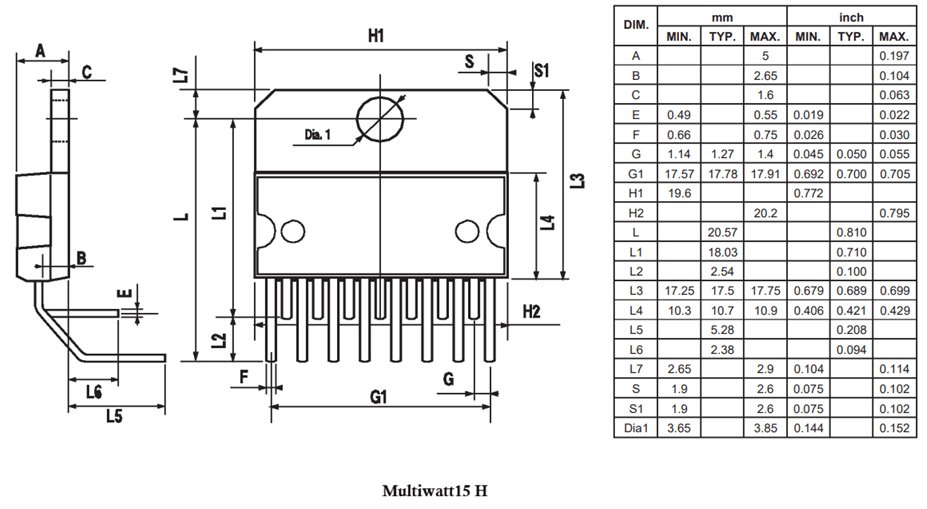
Dimensões Mecânicas
Conclusão
O IC driver de ponte dupla L298, com design de ponte H dupla, torna-o flexível o suficiente para controlar dois motores DC com escovas ou um motor de passo bipolar, enquanto seus pinos de habilitação permitem controle de velocidade simples através de PWM. Embora drivers modernos baseados em MOSFET sejam mais eficientes, menores e mais frios, o L298 ainda é útil porque é fácil de entender, amplamente disponível e adequado para robótica educacional, protótipos, pequenos sistemas de automação e circuitos gerais de controle de motor.
Perguntas Frequentes [FAQ]
1. Por que o L298 requer um suprimento de lógica separado (Vss) e um suprimento de motor (Vs)?
O L298 separa as seções de alimentação de lógica e motor para melhorar a confiabilidade. O suprimento de lógica alimenta o circuito de controle interno, enquanto o suprimento de motor alimenta as saídas da ponte H. Isso previne flutuações de tensão do motor e ruído elétrico de interferirem com os sinais de controle.
2. Por que o L298 gera mais calor do que os ICs modernos de driver de motor?
O L298 utiliza tecnologia de transistores bipolares, que apresenta uma queda de tensão maior na etapa de saída. Isso faz com que mais energia seja convertida em calor. Drivers modernos baseados em MOSFET têm perdas menores e, portanto, funcionam de forma mais eficiente.
3. Como funciona o controle de velocidade PWM com o L298?
PWM alterna rapidamente o pino ENA ou ENB ligado e desligado. Ao alterar o ciclo de trabalho do sinal PWM, a tensão média fornecida ao motor muda, permitindo um controle de velocidade suave sem alterar a tensão de alimentação.
4. Por que os pinos de detecção de corrente estão incluídos no L298?
Os pinos Sense A e Sense B permitem que resistores externos meçam a corrente do motor. Este recurso pode ser utilizado para proteção contra sobrecorrente, limitação de corrente, monitoramento de motor e sistemas de controle de motor em malha fechada.
5. Quais fatores determinam se um motor é adequado para o L298?
Os fatores mais importantes são a tensão do motor, a corrente contínua, a corrente de partida e a corrente de bloqueio. Os requisitos de corrente do motor devem permanecer dentro dos limites operacionais do L298 para evitar superaquecimento ou danos.
6. O L298 pode ser utilizado em dispositivos alimentados por bateria?
Sim, mas não é sempre a escolha mais eficiente. Devido às suas perdas de energia mais altas, o L298 consome mais energia do que drivers baseados em MOSFET, o que pode reduzir a vida útil da bateria em aplicações portáteis.
7. Por que os diodos de flyback são importantes nos circuitos de motor do L298?
Motores são cargas indutivas que geram picos de tensão quando a corrente muda repentinamente. Diodos de flyback redirecionam essa energia de forma segura e protegem o L298 de tensões de back-EMF potencialmente danificadoras.
Artigo relacionado
-
![O que é uma Fonte de Alimentação Digital e Como Funciona?]() Jun 26 2026
Jun 26 2026 -
![Arquitetura, Desempenho e Tecnologia UltraFusion do Apple M1 Ultra]() Jun 25 2026
Jun 25 2026


Produtos relacionados com
C4532JB1E106M250KA
CAP CER 10UF 25V JB 1812

GRM1885C1H7R5CA01J
CAP CER 7.5PF 50V C0G/NP0 0603
1812CC683KAZ3A
CAP CER 0.068UF 630V X7R 1812

C0603C0G1E8R2D
CAP CER 8.2PF 25V C0G 0201

T495C156K020ATE400
CAP TANT 15UF 10% 20V 2312
EPM7256SQC208-10
IC CPLD 256MC 10NS 208QFP
DS38EP100SD/NDPB
DS38EP100SD/NDPB NSC
HF115F-I/024-1HS3
HF115F-I/024-1HS3 HF

SQD100N03-3M2L_GE3
MOSFET N-CH 30V 100A TO252AA

PCA9548APW+118
PCA9548APW+118 NXP

S82375SB
S82375SB INTEL
S9S08QB8MDTE
S9S08QB8MDTE FREESCALE

534B1501JL
MODEL 534 TEN TURNS; 7/8" DIA BU